












В современной промышленной автоматизации поворотный энкодер служит “глазами” системы управления движением. По мере перехода к Индустрии 4.0 как никогда возрастает необходимость в корректной обратной связи в режиме реального времени. Независимо от того, разрабатываете ли вы высокоскоростную роботизированную руку, прецизионную медицинскую центрифугу или сверхмощную конвейерную систему, выбор правильного типа поворотного энкодера - это стратегическое решение, которое влияет на время работы системы, точность и общую стоимость владения (TCO).
Данное руководство представляет собой всестороннее инженерное исследование различных типов энкодеров, технологий измерения и моделей выбора. Оно призвано помочь вам сориентироваться в сложностях современных систем обратной связи в широком спектре промышленных применений.
Расшифровка основ современных типов поворотных энкодеров
По своей сути поворотный энкодер - это электромеханическое устройство, которое преобразует угловое положение вала или механическое движение в электрический сигнал. Этот сигнал - аналоговый или цифровой - затем обрабатывается контроллером (например, ПЛК или ЧПУ) для определения положения, скорости и направления вращения.
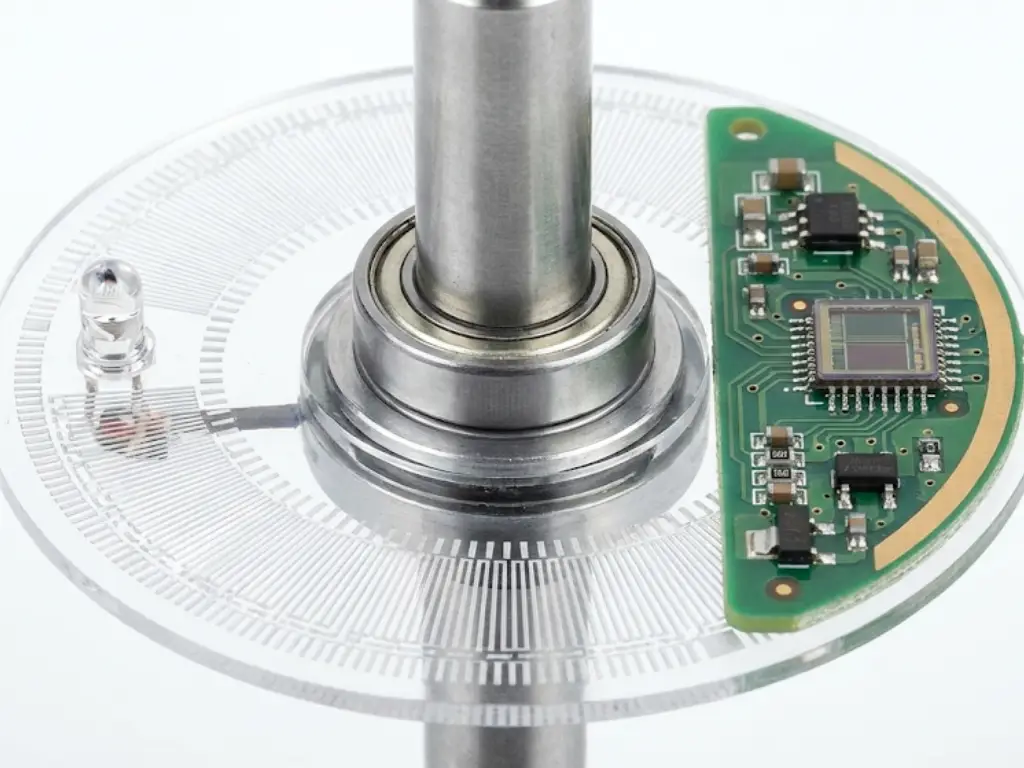
Современные энкодеры состоят из четырех основных компонентов:
- Жилье: Защищает внутренние компоненты от воздействия внешних факторов, таких как пыль, влага и электромагнитные помехи (EMI).
- Вал и подшипниковый узел: Механический интерфейс, соединяющий вращающееся оборудование.
- Кодовый диск или цель: Вращающийся элемент (оптический диск, вращающееся колесо или индуктивная мишень), который несет информацию о положении.
- Сенсор и электроника: Мозг“, который распознает изменения во вращающейся мишени и преобразует их в стандартизированные электрические сигналы.
Основная ценность энкодера заключается в том, что он может использоваться для соединения цифрового интеллекта и механического движения. В замкнутой системе энкодер используется для обеспечения обратной связи, необходимой контроллеру для внесения мгновенных поправок в механический выход, чтобы гарантировать, что механический выход идентичен запрограммированной команде.
Сравнение инкрементальных и абсолютных энкодеров для точного управления
Самый большой перекресток в процессе выбора - это выбор между инкрементальные поворотные энкодеры и абсолютные поворотные энкодеры. Этот параметр определяет, как система обрабатывает данные, особенно при отключении питания.
- Инкрементальные энкодеры: Специалисты по скорости и стоимости
Инкрементальные энкодеры обеспечивают обратную связь в виде потока импульсов при вращении вала. Обычно в них используются каналы “A” и “B”, расположенные на расстоянии 90 градусов друг от друга (квадратура) для определения направления. Третий канал “Z” или индексный канал обеспечивает один импульс на оборот для определения точки отсчета.
- Как они работают: Они определяют перемещение путем подсчета количества импульсов. Этот тип энкодера теряет свое положение в случае отключения питания, что требует последовательности “самонаведения” для повторного нахождения нулевой точки.
- Приложения:
- Конвейер Системы: Скорость ремней контролируется, постоянная скорость не важна, но важно абсолютное положение.
- Обратная связь с двигателями общего назначения: Это применяется при предоставлении информации об оборотах асинхронных двигателей переменного тока.
- Простые человеко-машинные интерфейсы (HMI): Например, регуляторы громкости или колеса прокрутки меню.
- Абсолютные энкодеры: Сайт Точность и мастера безопасности
Абсолютные энкодеры обеспечивают уникальный цифровой код для каждого углового положения. Даже если питание отключено, а вал перемещен, энкодер сообщит точное новое положение сразу же после включения питания, не требуя последовательности “самонаведения”.
- Как они работают: Они используют несколько дорожек на кодовом диске для создания уникального двоичного кода или кода Грея для каждого шага вращения. Они также разделяются на Однооборотный (покрытие 360) и Многооборотный (подсчет количества полных оборотов).
- Приложения:
- Роботизированные суставы: В ситуации, когда от точного положения руки зависит безопасность и точность, она сразу же начинает работать.
- Обработка с ЧПУ: Это необходимо для того, чтобы убедиться в правильном позиционировании инструментального сверла и избежать дорогостоящего повреждения заготовки.
- Спутниковые антенны: Сохранение данных об ориентации в спящих режимах энергосбережения.

Оптические против магнитных против индуктивных: Соответствие технологии окружающей среде
Предельная отказоустойчивость и высокая точность энкодера определяются тем, как он устроен. Эти технологии не могут быть одинаково эффективными в разных условиях, поэтому подбор технологий является важной частью инженерного процесса.
- Оптическое зондирование: Золотой стандарт для Точность
В оптических поворотных энкодерах используется высокоинтенсивный светодиодный источник света и оптический датчик (фотодетекторная матрица) для сканирования рисунка на кодовом диске.
- Физика: Он основан на прерывании света. Это позволяет получать невероятно мелкие детали, что приводит к сверхвысокому разрешению.
- Ограничение: Поскольку этот метод основан на использовании света, крошечная частица пыли или масляная пленка на диске могут привести к “пропущенным отсчетам”.
- Лучшее для: Чистые помещения, производство полупроводников и автоматизация высокоточных лабораторий.
- Магнитное зондирование: Сайт Прочный Рабочая лошадь
Магнитные поворотные энкодеры используют постоянный магнит и специализированный датчик, часто использующий эффект Холла или магнитосопротивление, для обнаружения изменений в магнитном поле.
- Физика: Поскольку магнитные поля проникают через немагнитные материалы, внутренние компоненты могут быть полностью герметизированы (горшки).
- Ограничение: Хотя они практически не подвержены воздействию жидкостей и пыли, их могут “ослепить” сильные внешние магнитные поля от расположенных рядом мощных двигателей или тормозов.
- Лучшее для: Пищевые продукты и напитки (зоны мойки), тяжелая строительная техника и наружные ветряные турбины.
- Индуктивные датчики: Надежная альтернатива
Индуктивные энкодеры, о которых часто умалчивают в базовых руководствах, используют электромагнитную индукцию между движущейся металлической мишенью (ротором) и неподвижным набором катушек (статором).
- Физика: Он работает аналогично трансформатору. Он устойчив практически к любым загрязнениям, таким как масло, вода и металлическая стружка, и на него не влияют магнитные поля постоянного тока.
- Ограничение: Обычно дороже и занимает большую площадь по сравнению с компактными магнитными моделями.
- Лучшее для: Аэрокосмические приводы, подводная разведка и высоконадежные оборонные системы.
Сайт Окружающая среда Модель подбора (матрица выбора)
Мы создали эту модель принятия решений, чтобы помочь вам принять решение на основе типичных производственных стрессов:
| Экологический стресс | Предпочтительная технология | Почему? |
| Тяжелое масло/охладитель | Магнитный / индуктивный | Оптические диски выходят из строя, если они покрыты непрозрачными жидкостями. |
| Высокие электромагнитные/магнитные поля | Оптический / индуктивный | Магнитные датчики страдают от “дрожания” или смещения сигнала. |
| Экстремальные удары/вибрации | Магнитный / индуктивный | Стеклянные оптические диски склонны к разрушению при высоких G-нагрузках. |
| Сверхвысокая точность | Оптический | В настоящее время ни одна технология не может сравниться с оптикой по разрешению в суб-арксекунды. |
| Погружной/вакуумный | Индуктивный | Высокая надежность благодаря отсутствию чувствительных оптических и магнитных компонентов. |
Навигация по механическим интерфейсам: Сплошной вал и полый вал
В промышленном управлении движением механический интерфейс является основной точкой отказа. Если электрические ошибки часто можно устранить с помощью программного обеспечения или экранирования, то механическое несоответствие приводит к катастрофическому разрушению подшипников или дрейфу сигнала. Выбор между конструкциями со сплошным и полым валом - это баланс между пространственные ограничения, установка точность, и вибрация демпфирование.
- Энкодеры со сплошным валом: Точность через Изоляцию
Традиционный вариант - энкодеры со сплошным валом (обычно диаметром 6 мм, 8 мм или 10 мм), которые используются в высокотехнологичных приложениях.
- Сайт Муфта Фактор: Для их установки на приводной вал требуется гибкая муфта (сильфонная, косозубая или Олдхэма). Эта муфта представляет собой своего рода “механический предохранитель”, допускающий угловые, параллельные и осевые смещения.
- Механическое напряжение: В конструкциях с цельным валом изоляция подшипников энкодера от теплового расширения и осевого “люфта” вала двигателя может привести к увеличению срока службы. Срок службы подшипников L10.
- Угол установки: Это трудоемкий процесс, поскольку он включает в себя правильное позиционирование двух отдельных валов. Однако его можно заменить с минимальными усилиями - в случае поломки энкодера вы можете заменить блок без необходимости разбирать главный привод.
- Энкодеры с полым валом: Интеграция, экономящая пространство
Сквозные датчики с полым валом устанавливаются на вал двигателя с помощью хомута или зажима.

- Пространство и след: Благодаря отсутствию необходимости в муфте и монтажном кронштейне, они значительно снижают осевой след двигателя в сборе. Это необходимо для роботизированных суставов и миниатюрного медицинского оборудования.
- Устойчивость к вибрациям: В условиях повышенной вибрации энкодеры с полым валом часто оказываются лучше. Поскольку корпус энкодера соединен с рамой машины через так называемую “муфту статора” (гибкую пружинную пластину), весь блок перемещается вместе с валом и уменьшает высокочастотные дрожания сигнала.
- Слепой полый вал: Это особый тип вала, в котором вал полностью проникает внутрь. Это дает небольшое преимущество полого вала и дополнительную защиту от попадания пыли и влаги в заднюю часть двигателя.
- Влияние на сложность и напряженность установки
| Тип интерфейса | Время установки | Допуск на несоосность | Точка механического напряжения |
| Цельный вал | Высокий (Требуется выравнивание) | Высокий (поглощается муфтой) | Износ/усталость муфты |
| Полый вал | Низкий (надвижной) | Низкий (фиксируется посадкой вала) | Подшипники энкодера (прямая нагрузка) |
Протоколы цифровой связи: От SSI до Industrial Ethernet
В традиционной сфере управления движением энкодер был “пассивным репортером” - он просто передавал импульсы или одно значение положения на контроллер. Однако с появлением Индустрия 4.0 и Промышленный интернет вещей (IIoT) кардинально изменило логику обратной связи. Поворотные энкодеры теперь интеллектуальные узлы, Они могут использоваться для связи в обоих направлениях и далеко не только для отслеживания местоположения.
- Переход от “слепой” обратной связи к “осознанным” данным
Классические протоколы, такие как SSI (Синхронный последовательный интерфейс) или BiSS-C очень быстры и надежны в общении “точка-точка”. Но они "слепы" к своему здоровью. Когда энкодер SSI выходит из строя из-за слишком сильной вибрации или загрязненного кодового диска, контроллер обнаруживает только потерю сигнала или бит ошибки, обычно уже после того, как машина вышла из строя.
Эта логика была переосмыслена современными протоколами, такими как IO-Link и Промышленный Ethernet (EtherCAT, PROFINET) которые предоставляют “слой услуг” в дополнение к “слою данных процесса”.
- IO-Link: “USB” промышленных датчиков
Нижний уровень автоматизации был преобразован IO-Link. Это первая глобальная стандартизированная технология IO (IEC 61131-9) для связи с датчиками и исполнительными устройствами.
- Изменение логики: Энкодер IO-Link способен не только передавать данные о положении, но и параметризует и предлагает диагностика.
- Ключевое преимущество: Если энкодер сломался, можно вставить новый, и IO-Link Master автоматически “загрузит” прежнюю конфигурацию в новое устройство. Это минимизирует Среднее время ремонта (MTTR) до минут.
- Предсказание: Он может сообщать о внутренней температуре или предупреждающих сигналах (например, “Загрязнение объектива”). до при возникновении неисправности, что переводит обслуживание из разряда реактивного в разряд проактивного.
- EtherCAT: В режиме реального времени Синхронизация и не только
В высокопроизводительных приложениях, таких как многоосевая робототехника или обработка с ЧПУ, EtherCAT это стандарт перспективной инженерии.
- Распределенные часы (DC): В EtherCAT-кодерах используется аппаратная синхронизация, которая позволяет синхронизировать оси с джиттером менее 1 микросекунда. Это очень важно в тех случаях, когда несколько двигателей должны двигаться абсолютно синхронно.
- Децентрализованная логика: В отличие от SSI, где всю тяжелую работу выполняет ПЛК, энкодер EtherCAT может выполнять некоторую предварительную обработку данных, снижая вычислительную нагрузку на центральный контроллер.
- Упрощенный Топология: Благодаря “последовательной цепочке” вы можете подключить сотни энкодеров с помощью стандартных кабелей Ethernet, что значительно снижает сложность проводки и вероятность ошибок сигнала, вызванных электромагнитными помехами.

- Перспективный край: кодировщики как краевые устройства
Наибольшее техническое усовершенствование протоколов кодирования заключается в принятии Возможности граничных вычислений.
В настоящее время перспективные кодировщики оснащаются функцией мониторинга:
- Анализ вибрации: Износ подшипников в самом двигателе.
- Часы работы: Отслеживание фактической “рабочей нагрузки” машины для обслуживания на основе использования.
- Контроль целостности сигнала: Анализ качества внутреннего освещения или магнитного поля для прогнозирования окончания срока службы.
Разрешение и точность: Основные показатели для оптимизации производительности
Различие между разрешением и точностью часто является “решающим” фактором в высокопроизводительном управлении движением. Хотя в повседневном общении эти термины часто используются как взаимозаменяемые, в точном машиностроении они представляют собой два принципиально разных аспекта качества обратной связи.
Разрешение: Гранулярность ваших данных
Подумайте о Разрешение как количество “засечек” или “шагов”, которые энкодер видит за один полный оборот на 360 градусов. Он определяет наименьшее перемещение, которое может обнаружить система.
- Инкрементальные энкодеры: Мы измеряем их разрешение в Количество импульсов на оборот (PPR). Чем больше импульсов, тем тоньше управление.
- Абсолютные энкодеры: Они используют биты для определения разрешения. Каждый дополнительный бит удваивает количество уникальных позиций, которые может определить кодировщик (например, 16-битный кодировщик может “увидеть” более 65 000 отдельных точек в одной окружности).
С практической точки зрения: Если вы выбрали кодировщик с 10 000 PPR, По сути, вы разрезаете полный круг на десять тысяч крошечных сегментов. Это означает, что каждый раз, когда энкодер посылает сигнал, ваша машина перемещается всего на тридцать шесть тысячных градуса (0,036°). Именно такой уровень детализации позволяет роботизированной руке вдевать нитку в иголку или станку с ЧПУ вырезать сложные узоры.
Ловушка разрешения и стабильность системы
Еще одна ошибка, которую часто допускают в инженерном деле, - чрезмерное указание разрешения в надежде сделать систему более точной. Это приводит к тому, что “Ловушка разрешения”: использование энкодера высокого разрешения на механически свободной системе.
Если разрешение слишком велико по отношению к механическим допускам системы (например, люфту в шестернях), контроллер может “охотиться” за точным положением, вызывая микроколебания и нагрев двигателя. Хитрость оптимизации производительности заключается в достижении так называемого “Инженерная зона Златовласки” где разрешение достаточно для плавного управления скоростью без превышения механических ограничений аппаратуры.
Инженерные метрики для высокоскоростных систем
При разработке высокоскоростных или высокомоментных конструкций необходимо учитывать еще два момента:
- Повторяемость (Точность): Способность энкодера выдавать одно и то же значение при возвращении вала в точно такое же физическое положение. Для большинства задач промышленной автоматизации повторяемость часто более важна, чем абсолютная точность.
- Ошибка квантования: Неопределенность, присущая любой цифровой системе, которая обычно составляет $\pm \frac{1}{2}$ наименьшего значащего бита (LSB).
Стратегическое преимущество: Гарантия эффективности OMCH
В мире промышленных компонентов оптимизация производительности не может обсуждаться вне производственной последовательности. Именно здесь ОМЧ предлагает очевидные конкурентные преимущества как инженерам, так и оптовикам.
- Индивидуальная спецификация (3000+ SKU): OMCH не заставляет вас подстраиваться под “универсальное решение”. С более чем 3 000 моделей и спецификаций, Вы можете выбрать именно тот PPR или глубину битов, который соответствует требованиям вашей механической системы. Это позволяет избежать лишних трат, связанных с завышенной спецификацией, и в то же время не упустить точность.
- Точность подтверждена тщательными испытаниями: В отличие от производителей дженериков, производство OMCH поддерживается ISO9001 управление качеством. Все энкодеры проверяются в три этапа:
- Входящая инспекция: Обеспечение чистоты оптических дисков и магнитных мишеней.
- Технологическая инспекция: Использование 7 специализированных производственных линий позволяет соблюдать строгие механические допуски и предотвращать эксцентриситет.
- Исходящий контроль качества (OQC): Проверка соответствия каждого прибора номинальной точности измерения угловых минут перед отправкой.
- Глобальная надежность для 72 000+ клиентов: Энкодеры OMCH прошли испытания в полевых условиях более чем в 100 странах, в высокоточном медицинском оборудовании и в грубом текстильном оборудовании. Этот огромный массив данных о реальных применениях позволяет компании OMCH оптимизировать свои конструкции для достижения наивысших результатов. Отношение сигнал/шум (SNR) чтобы высокое разрешение, за которое вы платите, не пропадало зря из-за электрических помех.

Приобретая OMCH, вы покупаете не просто датчик, а часть системы, которая разрабатывалась на протяжении 30 лет исследования и разработки обеспечивают “истину” в данных, которая требуется в современных промышленных системах. Стандартный счетчик импульсов или высокоразрядный абсолютный сигнал, OMCH Техническая поддержка 24/7 вы будете уверены, что показатели “Разрешение и точность” находятся именно там, где вы хотите, с точки зрения целей производительности машины.
Рамки стратегического выбора: 5-этапная матрица принятия решений для инженеров
Приведенная ниже матрица поможет вам упростить процесс выбора. Эта модель представляет собой баланс между технической и коммерческой целесообразностью.
Матрица выбора кодировщика
| Критерии отбора | Инкрементный (оптический/маг) | Абсолютный (одно/многооборотный) | Промышленные кодирующие устройства Ethernet |
| Поведение стартапа | Требуется наведение | Мгновенная позиция известна | Мгновенные + диагностические данные |
| Стоимость Сложность | От низкого до умеренного | От умеренного до высокого | Высокий |
| Целостность данных | Высокая (с экранированными кабелями) | Очень высокий (цифровой) | Ультравысокий (сетевой) |
| Типичная среда | От чистого до легкого промышленного | Тяжелая промышленность | Умные фабрики / IOT |
| Техническое обслуживание | Периодическая проверка дома | Низкий | Предиктивный (самоотчет) |
Процесс из 5 шагов:
- Определите профиль движения: Вам нужен контроль скорости (инкрементный) или точное позиционирование (абсолютное)?
- Оцените Окружающая среда: Будут ли там масло, пыль или электромагнитные помехи? (Оптические и магнитные).
- Механические ограничения: Есть ли место для муфты, или вам нужна полая конструкция?
- Протокол интеграции: На каком языке говорит ваш ПЛК/привод? (SSI, BiSS или EtherCAT?)
- Оцените Общая стоимость владения (TCO): Не смотрите только на ценник. Учитывайте стоимость “домашнего” времени.
Профилактическое обслуживание и устранение неисправностей промышленных энкодеров
Даже самые совершенные энкодеры нуждаются в техническом обслуживании для достижения оптимального срока службы.
Распространенные виды отказов:
- Сигнальный шум: Часто возникает из-за плохого экранирования или неправильного заземления. Убедитесь, что кабели имеют витые пары и экранированы.
- Отказ подшипника: Обычно из-за чрезмерной нагрузки на вал или несоосности. Используйте гибкие муфты для массивных валов.
- Загрязнение: Если оптический энкодер начинает “пропускать” импульсы, это может быть связано с попаданием масла или пыли на кодовый диск.
Контрольный список поиска и устранения неисправностей:
- Проверьте источник питания: Проверьте напряжение на контактах энкодера (а не только на источнике питания), чтобы учесть падение напряжения в длинных кабелях.
- Осмотрите соединения: Неплотное соединение проводов в клеммной колодке является #1 причиной периодической потери сигнала.
- Проверка осциллографа: Инкрементальные энкодеры Проверьте квадратуру (сдвиг фаз на 90 градусов) между каналами A и B.
Заключение
Ориентирование в различных типах поворотных энкодеров требует сочетания механического и электронного видения. Понимание различий между инкрементальной и абсолютной логикой, подбор сенсорной технологии в соответствии с условиями эксплуатации и использование стратегической модели выбора позволят вам обеспечить максимальную производительность ваших систем автоматизации.



