












Dans le paysage de l'automatisation industrielle moderne, le codeur rotatif sert d“”yeux" au système de contrôle des mouvements. Les industries ayant évolué vers l'industrie 4.0, la nécessité de disposer d'un retour d'information correct et en temps réel n'a jamais été aussi forte. Que vous conceviez un bras robotisé à grande vitesse, une centrifugeuse médicale de précision ou un système de convoyage lourd, le choix du bon type de codeur rotatif est une décision stratégique qui a un impact sur le temps de fonctionnement du système, la précision et le coût total de possession (TCO).
Ce guide est une étude technique complète des différents types de codeurs, des technologies de détection et des modèles de sélection. Il est conçu pour vous aider à naviguer dans les complexités des systèmes de retour d'information actuels dans une large gamme d'applications industrielles.
Décoder les principes fondamentaux des types de codeurs rotatifs modernes
À la base, un codeur rotatif est un dispositif électromécanique qui convertit la position angulaire de l'arbre ou le mouvement mécanique en un signal électrique. Ce signal, qu'il soit analogique ou numérique, est ensuite traité par un contrôleur (tel qu'un PLC ou une CNC) pour déterminer la position, la vitesse et la direction de la rotation.
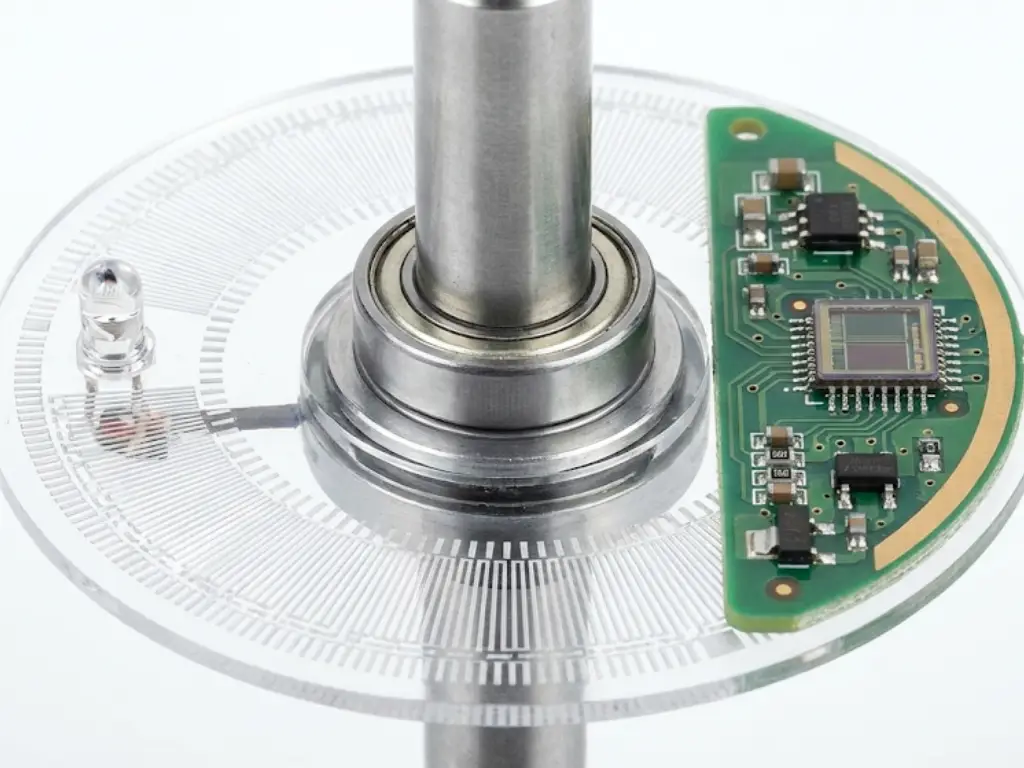
Les codeurs actuels se composent de quatre éléments principaux :
- Le logement : Protège les composants internes des facteurs environnementaux tels que la poussière, l'humidité et les interférences électromagnétiques (EMI).
- L'ensemble arbre et palier : L'interface mécanique qui se connecte à l'équipement rotatif.
- Le disque de code ou la cible : Un élément rotatif (disque optique, roue tournante ou cible inductive) qui transmet l'information sur la position.
- Le capteur et l'électronique : Le “cerveau” qui détecte les changements dans la cible en rotation et les convertit en sorties électriques normalisées.
La valeur fondamentale d'un codeur est qu'il peut être utilisé pour faire le lien entre l'intelligence numérique et le mouvement mécanique. Un système en boucle fermée utilise le codeur pour fournir le retour d'information nécessaire au contrôleur pour apporter des corrections instantanées à la sortie mécanique afin de s'assurer que la sortie mécanique est identique à la commande programmée.
Comparaison des codeurs incrémentaux et absolus pour un contrôle précis
Le plus grand carrefour du processus de sélection est le choix entre codeurs rotatifs incrémentaux et codeurs rotatifs absolus. Cette option définit la manière dont le système traite les données, en particulier lorsque l'alimentation est interrompue.
- Codeurs incrémentaux : Les spécialistes de la vitesse et du coût
Les codeurs incrémentaux fournissent un retour d'information sous la forme d'un flux d'impulsions au fur et à mesure que l'arbre tourne. Ils utilisent normalement les canaux “A” et “B” qui sont espacés de 90 degrés (quadrature) pour identifier la direction. Un troisième canal “Z” ou index fournit une seule impulsion par tour pour établir un point de référence.
- Comment ils fonctionnent : Ils déterminent le mouvement en comptant le nombre d'impulsions. Ce type de codeur perd sa position en cas de coupure de courant, ce qui nécessite une séquence de “homing” pour retrouver le point zéro.
- Applications :
- Convoyeur Systèmes : La vitesse des courroies est contrôlée et la vitesse constante n'est pas importante, mais la position absolue l'est.
- Rétroaction des moteurs à usage général : Cela s'applique à la fourniture d'informations sur la vitesse de rotation des moteurs à induction à courant alternatif.
- Interfaces homme-machine (IHM) simples : Comme les boutons de volume ou les roues de défilement des menus.
- Codeurs absolus : Les Précision et les maîtres de la sécurité
Les codeurs absolus fournissent un code numérique unique pour chaque position angulaire. Même si l'alimentation est coupée et que l'arbre est déplacé, le codeur indiquera la nouvelle position exacte dès la mise sous tension, sans qu'il soit nécessaire d'effectuer une séquence de “retour à l'origine”.
- Comment ils fonctionnent : Ils utilisent plusieurs pistes sur un disque de code pour produire un code binaire ou Gray unique pour chaque incrément de rotation. Ils sont également séparés en Monotour (couverture de 360) et Multi-tour (en comptant le nombre de rotations complètes).
- Applications :
- Articulations robotisées : Dans une situation où la position exacte d'un bras est une question de sécurité et de précision, elle commence immédiatement.
- Usinage CNC : Il s'agit de s'assurer que la mèche de l'outil est correctement positionnée afin d'éviter tout endommagement coûteux de la pièce.
- Antennes satellites : Stockage des données d'orientation dans les modes de veille et d'économie d'énergie.

Optique vs. magnétique vs. inductif : Adapter la technologie à l'environnement
La résistance ultime et la haute précision d'un codeur sont définies par le “comment” de la détection. Ces technologies ne s'épanouissent pas toutes dans le même environnement, ce qui fait de l'adéquation des technologies un élément essentiel du processus d'ingénierie.
- Détection optique : L'étalon-or pour les Précision
Les codeurs rotatifs optiques utilisent une source lumineuse LED à haute intensité et un capteur optique (matrice de photo-détecteurs) pour scanner des motifs sur un disque de code.
- La physique : Il repose sur l'interruption de la lumière. Cela permet d'obtenir des incréments incroyablement fins, ce qui se traduit par une résolution ultra-élevée.
- La contrainte : Comme il s'agit d'une technique basée sur la lumière, une minuscule particule de poussière ou un film d'huile sur le disque peut entraîner des “comptages manqués”.
- Meilleur pour : Salles blanches, fabrication de semi-conducteurs et automatisation de laboratoires de haute précision.
- Détection magnétique : La Robuste Cheval de trait
Les codeurs rotatifs magnétiques utilisent un aimant permanent et un capteur spécialisé, utilisant souvent l'effet Hall ou la magnétorésistance, pour détecter les variations du champ magnétique.
- La physique : Comme les champs magnétiques pénètrent à travers les matériaux non magnétiques, les composants internes peuvent être complètement encapsulés (enrobés).
- La contrainte : Bien qu'ils soient pratiquement insensibles aux liquides et à la poussière, ils peuvent être “aveuglés” par des champs magnétiques externes puissants provenant de moteurs ou de freins à haute puissance situés à proximité.
- Meilleur pour : Alimentation et boissons (aires de lavage), machines de construction lourdes et éoliennes extérieures.
- Détection inductive : L'alternative robuste
Souvent négligés dans les guides de base, les codeurs inductifs utilisent l'induction électromagnétique entre une cible métallique mobile (le rotor) et un ensemble de bobines fixes (le stator).
- La physique : Son fonctionnement est similaire à celui d'un transformateur. Il est naturellement résistant à pratiquement tous les types de contamination, tels que l'huile, l'eau et les copeaux de métal, et il n'est pas affecté par les champs magnétiques continus.
- La contrainte : Généralement plus coûteux et plus encombrant que les modèles magnétiques compacts.
- Meilleur pour : Actionneurs aérospatiaux, exploration sous-marine et systèmes de défense à haute fiabilité.
Les Environnement Modèle d'appariement (matrice de sélection)
Nous avons créé ce modèle de décision pour vous aider à prendre une décision sur la base des facteurs de stress typiques de l'industrie :
| Agresseur environnemental | Technologie préférée | Pourquoi ? |
| Huile lourde/liquide de refroidissement | Magnétique / Inductif | Les disques optiques ne fonctionnent pas s'ils sont enduits de liquides opaques. |
| Champs magnétiques et électromagnétiques élevés | Optique / Inductif | Les capteurs magnétiques souffrent d'une “gigue” ou d'un décalage du signal. |
| Chocs/vibrations extrêmes | Magnétique / Inductif | Les disques optiques en verre sont susceptibles de se briser sous l'effet de charges G élevées. |
| Ultra haute précision | Optique | Actuellement, aucune autre technologie ne permet d'atteindre la résolution inférieure à la seconde d'arc de l'optique. |
| Submergée / sous vide | Inductif | Haute fiabilité sans composants optiques ou magnétiques sensibles. |
Naviguer dans les interfaces mécaniques : Arbres pleins et arbres creux
Dans le domaine de la commande de mouvement industrielle, l'interface mécanique est le principal point de défaillance. Alors que les erreurs électriques peuvent souvent être corrigées par un logiciel ou un blindage, une inadéquation mécanique entraîne une défaillance catastrophique des roulements ou une dérive du signal. Le choix entre un arbre plein et un arbre creux est un équilibre entre contraintes spatiales, installation précision, et les vibrations amortissement.
- Encodeurs à arbre plein : Précision via Isolation
Les codeurs à arbre plein (généralement de 6, 8 ou 10 mm de diamètre) sont traditionnellement utilisés dans les applications haut de gamme.
- Les Accouplement Facteur : Ils nécessitent un accouplement flexible (à soufflet, hélicoïdal ou Oldham) pour s'adapter à l'arbre d'entraînement. Cette liaison est une sorte de “fusible mécanique” qui accepte les désalignements angulaires, parallèles et axiaux.
- Contrainte mécanique : Dans les conceptions à arbre plein, le fait d'isoler les roulements du codeur de la dilatation thermique et du “jeu” axial de l'arbre du moteur peut permettre de prolonger la durée de vie des roulements du codeur. Durée de vie du palier L10.
- Angle d'installation : Elle prend du temps car elle nécessite le positionnement correct de deux arbres distincts. Cependant, il peut être remplacé avec un minimum d'effort - si le codeur est cassé, vous pouvez changer l'unité sans avoir à démonter l'entraînement principal.
- Codeurs à arbre creux : L'intégration à faible encombrement
Les codeurs à arbre creux traversant sont montés sur l'arbre du moteur au moyen d'un collier ou d'une pince.

- Espace et empreinte : Comme ils éliminent la nécessité d'un accouplement et d'un support de montage, ils réduisent de manière significative les coûts d'exploitation et d'entretien. empreinte axiale de l'ensemble du moteur. Ceci est impératif dans les articulations robotiques et les équipements médicaux miniatures.
- Résistance aux vibrations : Dans les environnements soumis à de fortes vibrations, les codeurs à arbre creux sont souvent supérieurs. Le corps du codeur étant relié au bâti de la machine par un “accouplement statorique” (plaque de ressort flexible), l'ensemble de l'unité se déplace avec l'arbre, ce qui réduit l'instabilité du signal à haute fréquence.
- Arbre creux aveugle : Il s'agit d'un type d'arbre spécial dans lequel l'arbre est entièrement pénétré. Cela présente le petit avantage d'un arbre creux avec la sécurité supplémentaire que la poussière et l'humidité ne pénètrent pas à l'arrière du moteur.
- Impact sur la complexité et le stress de l'installation
| Type d'interface | Temps d'installation | Tolérance de désalignement | Point de contrainte mécanique |
| Arbre plein | Élevé (nécessite un alignement) | Élevée (absorbée par l'accouplement) | Usure/fatigue de l'accouplement |
| Arbre creux | Bas (coulissant) | Faible (fixé par l'ajustement de l'arbre) | Roulements du codeur (charge directe) |
Protocoles de communication numérique : De SSI à Ethernet industriel
Dans le paysage traditionnel du contrôle des mouvements, un codeur était un “rapporteur passif” - il envoyait simplement des impulsions ou une valeur de position unique à un contrôleur. Cependant, l'essor des Industrie 4.0 et le Internet industriel des objets (IIoT) a fondamentalement modifié la logique de rétroaction. Les codeurs rotatifs sont désormais nœuds intelligents, et peuvent être utilisés pour communiquer dans les deux sens, et bien au-delà du suivi de la position.
- Le passage d'un retour d'information “aveugle” à des données “conscientes”.
Les protocoles classiques tels que SSI (Interface série synchrone) ou BiSS-C sont très rapides et fiables dans les communications point à point. Mais ils sont “aveugles” à leur état de santé. Lorsqu'un codeur SSI fonctionne mal en raison de vibrations trop importantes ou d'un disque de code sale, seule une perte de signal ou un bit d'erreur est détecté par le contrôleur, généralement après que la machine s'est déjà arrêtée.
Cette logique a été redéfinie par les protocoles modernes tels que IO-Link et Ethernet industriel (EtherCAT, PROFINET) qui fournissent une “couche de services” en plus de la “couche de données de processus”.
- IO-Link: L“”USB" des capteurs industriels
Le niveau inférieur de l'automatisation a été transformé par IO-Link. Il s'agit de la première technologie IO normalisée au niveau mondial (CEI 61131-9) pour la communication avec les capteurs et les actionneurs.
- Changement de logique : Un codeur IO-Link peut non seulement envoyer des données de position, mais aussi paramétrise et propose diagnostics.
- Avantage principal : Si un codeur est cassé, vous pouvez en insérer un nouveau, et le maître IO-Link “téléchargera” automatiquement l'ancienne configuration vers le nouveau dispositif. Cela permet de minimiser Temps moyen de réparation (MTTR) à des minutes.
- Aperçu prédictif : Il peut signaler la température interne ou des drapeaux d'avertissement (par exemple, “Contamination de l'objectif”). avant une panne se produit, ce qui fait passer la maintenance d'une approche réactive à une approche proactive.
- EtherCAT : Temps réel Synchronisation et au-delà
Dans les applications à haute performance telles que la robotique multi-axes ou l'usinage CNC, EtherCAT est la norme de l'ingénierie orientée vers l'avenir.
- Horloges distribuées (DC) : Les encodeurs EtherCAT utilisent une synchronisation matérielle qui permet de synchroniser les axes avec une gigue inférieure à 1 microseconde. Ceci est essentiel dans les applications où un certain nombre de moteurs doivent se déplacer en parfaite synchronisation.
- Logique décentralisée : Contrairement au SSI, où l'automate fait tout le travail, un codeur EtherCAT peut effectuer un prétraitement des données, réduisant ainsi la charge de calcul du contrôleur central.
- Simplifié Topologie: Grâce au “daisy-chaining”, vous pouvez connecter des centaines de codeurs à l'aide de câbles Ethernet standard, ce qui réduit considérablement la complexité du câblage et le risque d'erreurs de signal induites par les interférences électromagnétiques (EMI).

- L'avant-garde tournée vers l'avenir : les codeurs comme dispositifs d'avant-garde
La plus grande amélioration technique des protocoles d'encodage est l'adoption de la technologie Capacités d'informatique en périphérie (Edge Computing).
Les encodeurs prêts pour l'avenir sont désormais équipés pour surveiller :
- Analyse des vibrations : L'usure des roulements du moteur lui-même.
- Heures d'ouverture : Suivi de la charge de travail réelle d'une machine pour une maintenance basée sur l'utilisation.
- Contrôle de l'intégrité du signal : Analyser la qualité du champ lumineux ou magnétique en interne pour prévoir la fin de vie.
Résolution et précision : Mesures essentielles pour l'optimisation des performances
La distinction entre résolution et précision est souvent le facteur décisif dans le contrôle des mouvements à haute performance. Bien que ces termes soient souvent utilisés de manière interchangeable dans la conversation courante, ils représentent, en ingénierie de précision, deux aspects fondamentalement différents de la qualité du retour d'information.
Résolution : La granularité de vos données
Pensez à Résolution comme le nombre de “crans” ou de “pas” qu'un codeur voit dans un tour complet de 360 degrés. Il s'agit du plus petit mouvement que le système puisse détecter.
- Encodeurs incrémentaux : Nous mesurons leur résolution en Impulsions par révolution (PPR). Plus il y a d'impulsions, plus le contrôle est fin.
- Codeurs absolus : Ceux-ci utilisent bits pour définir la résolution. Chaque bit supplémentaire double le nombre de positions uniques que le codeur peut identifier (par exemple, un codeur 16 bits peut “voir” plus de 65 000 points distincts dans un seul cercle).
En termes pratiques : Si vous sélectionnez un codeur avec 10 000 PPR, En d'autres termes, vous découpez un cercle complet en dix mille segments minuscules. Cela signifie qu'à chaque fois que le codeur envoie un signal, votre machine s'est déplacée de seulement trente-six millièmes de degré (0,036°). C'est ce niveau de granularité qui permet à un bras robotisé d'enfiler une aiguille ou à une machine à commande numérique de graver des motifs complexes.
Le “piège de la résolution” et la stabilité du système
Une autre erreur fréquemment commise en ingénierie est la spécification excessive de la résolution dans l'espoir de rendre le système plus précis. Cela conduit à la “Le piège de la résolution”: utilisation d'un codeur à haute résolution sur un système mécaniquement lâche.
Si votre résolution est trop élevée par rapport aux tolérances mécaniques de votre système (comme le jeu des engrenages), le contrôleur peut “rechercher” la position exacte, ce qui provoque des micro-vibrations et une accumulation de chaleur dans le moteur. L'astuce pour optimiser les performances consiste à atteindre ce que l'on appelle la "résolution". “L'ingénierie dans la zone Boucle d'or” où la résolution est suffisante pour permettre un contrôle fluide de la vitesse sans dépasser les limites mécaniques du matériel.
Mesures d'ingénierie pour les systèmes à grande vitesse
Deux autres mesures interviennent lors de la conception de modèles à grande vitesse ou à couple élevé :
- Répétabilité (Précision): La capacité du codeur à fournir la même valeur lorsque l'arbre revient exactement à la même position physique. Pour la plupart des tâches d'automatisation industrielle, la répétabilité est souvent plus importante que la précision absolue.
- Erreur de quantification: L“”incertitude" inhérente à tout système numérique, qui est généralement $\pm \frac{1}{2}$ du bit le moins significatif (LSB).
Avantage stratégique : La garantie de performance de l'OMCH
L'optimisation des performances ne peut être abordée en dehors de la cohérence de la fabrication dans le monde des composants industriels. C'est là que l'optimisation des performances OMCH offre un avantage concurrentiel évident aux ingénieurs et aux grossistes.
- Spécification sur mesure (plus de 3000 UGS) : OMCH ne vous impose pas une solution “unique”. Avec plus de 3 000 modèles et spécifications, Vous pouvez ainsi sélectionner le PPR ou la profondeur de bit exacts qui correspondent aux exigences de votre système mécanique. Vous évitez ainsi le gaspillage lié à la surspécification et vous ne manquez jamais de précision.
- Précision certifiée par des tests rigoureux : Contrairement aux fabricants de génériques, la production de l'OMCH est soutenue par l'État. ISO9001 gestion de la qualité. Tous les codeurs sont contrôlés en trois étapes :
- Inspection entrante : Garantir la pureté des disques optiques et des cibles magnétiques.
- Inspection des processus : L'utilisation de 7 lignes de production dédiées permet de maintenir des tolérances mécaniques strictes et d'éviter les excentricités.
- Contrôle de qualité sortant (OQC) : Vérifier que chaque unité est conforme à sa précision nominale en minutes d'arc avant de l'expédier.
- Fiabilité mondiale pour plus de 72 000 clients : Les codeurs OMCH ont été testés sur le terrain dans plus de 100 pays, dans des équipements médicaux de haute précision et dans des équipements textiles grossiers. Ce vaste ensemble de données d'applications réelles permet à OMCH d'optimiser ses conceptions afin d'obtenir les meilleurs résultats possibles. Rapport signal/bruit (SNR) afin que la haute résolution que vous payez ne soit pas gaspillée par des interférences électriques.

Lorsque vous achetez OMCH, vous n'achetez pas un capteur, vous achetez un élément d'un système qui a été développé au fil du temps. 30 ans de la recherche et le développement pour offrir la “vérité” des données requise dans les systèmes industriels modernes. Comptage d'impulsions standard ou signal absolu à haut débit, OMCH Assistance technique 24 heures sur 24, 7 jours sur 7 vous assurera que vos mesures de “résolution et de précision” sont exactement celles que vous souhaitez en termes d'objectifs de performance de la machine.
Cadre de sélection stratégique : Une matrice de décision en 5 étapes pour les ingénieurs
La matrice suivante vous aidera à simplifier votre processus de sélection. Ce modèle est un équilibre entre la faisabilité technique et commerciale.
Matrice de sélection des codeurs
| Critères de sélection | Incrémental (optique/mag) | Absolu (mono/multi-tour) | Codeurs Ethernet industriels |
| Comportement au démarrage | Nécessite un repérage | Position instantanée connue | Instantané + données de diagnostic |
| Coût Complexité | Faible à modéré | Modéré à élevé | Haut |
| Intégrité des données | Élevé (avec des câbles blindés) | Très élevé (numérique) | Ultra élevé (en réseau) |
| Environnement typique | De l'industrie propre à l'industrie légère | Industrie lourde | Usines intelligentes / IOT |
| Maintenance | Contrôle périodique du domicile | Faible | Prédictif (autodéclaration) |
Le processus en 5 étapes :
- Définir le profil de mouvement : Avez-vous besoin d'un contrôle de la vitesse (incrémental) ou d'un positionnement précis (absolu) ?
- Évaluer les Environnement: Y aura-t-il de l'huile, de la poussière ou des interférences électromagnétiques ? (optique ou magnétique).
- Contraintes mécaniques : Y a-t-il de la place pour un raccord, ou faut-il une conception à alésage creux ?
- Protocole d'intégration : Quelle est la langue parlée par votre PLC/Drive ? (SSI, BiSS, ou EtherCAT ?)
- Évaluer Coût total de possession (TCO) : Ne vous contentez pas de regarder le prix. Prenez en compte le coût du temps consacré à la recherche d'un logement.
Maintenance préventive et dépannage des codeurs industriels
Même les codeurs les plus sophistiqués doivent être entretenus pour atteindre leur durée de vie optimale.
Modes de défaillance courants :
- Bruit du signal : Souvent causé par un mauvais blindage ou une mauvaise mise à la terre. Veiller à ce que les câbles soient torsadés et blindés.
- Défaillance du palier : Généralement due à une charge ou un désalignement excessif de l'arbre. Utiliser des accouplements flexibles pour les arbres pleins.
- Contamination : Si un codeur optique commence à “sauter” des impulsions, cela peut être dû à la présence d'huile ou de poussière sur le disque de codage.
Liste de contrôle pour le dépannage :
- Vérifier l'alimentation électrique : Vérifier la tension au niveau des broches du codeur (et pas seulement au niveau de la source d'alimentation) pour tenir compte des chutes de tension dans les longs câbles.
- Inspecter les connexions : Un câblage desserré dans le bornier est la cause #1 d'une perte intermittente de signal.
- Vérification de l'oscilloscope : Codeurs incrémentaux Vérifier la quadrature (déphasage de 90 degrés) entre les canaux A et B.
Conclusion
Les différents types de codeurs rotatifs requièrent une combinaison de vision mécanique et électronique. En comprenant les distinctions entre logique incrémentale et logique absolue, en adaptant la technologie de détection à votre environnement et en utilisant un modèle de sélection stratégique, vous pouvez vous assurer que vos systèmes d'automatisation fonctionnent de manière optimale.



